El Rigging Mecánico es una técnica fundamental dentro de Blender para la animación de sistemas compuestos por piezas articuladas o interdependientes, como engranajes, pistones, bielas, brazos robóticos o mecanismos industriales complejos.
A diferencia del rigging orgánico —centrado en personajes y deformaciones musculares— el rigging mecánico busca obtener movimientos precisos, matemáticamente controlados y físicamente coherentes. Para ello, es común utilizar relaciones trigonométricas, restricciones (constraints), drivers y scripts que automatizan el comportamiento de cada componente.
El concepto de Rigging puede consultarse en Wikipedia:
https://es.wikipedia.org/wiki/Rigging
En Blender, este tipo de configuraciones resulta especialmente útil en el desarrollo de videojuegos, simulaciones técnicas y visualización industrial, donde la precisión del movimiento y la interacción en tiempo real son esenciales.
Construcción del brazo robótico
Para animar este brazo robótico se emplearon razones trigonométricas que permiten calcular automáticamente los ángulos de rotación de cada articulación en función de la posición del objetivo.
Sin embargo, esta no es la única forma de resolver el problema. Blender también permite implementar sistemas basados en Cinemática Inversa (IK), una técnica ampliamente utilizada en robótica y animación procedural.
[cite] En robótica, la Cinemática Inversa (IK) es la técnica que permite determinar el movimiento de una cadena de articulaciones para lograr que un actuador final se ubique en una posición concreta. [/cite]
Más información:
https://es.wikipedia.org/wiki/Cinem%C3%A1tica_inversa
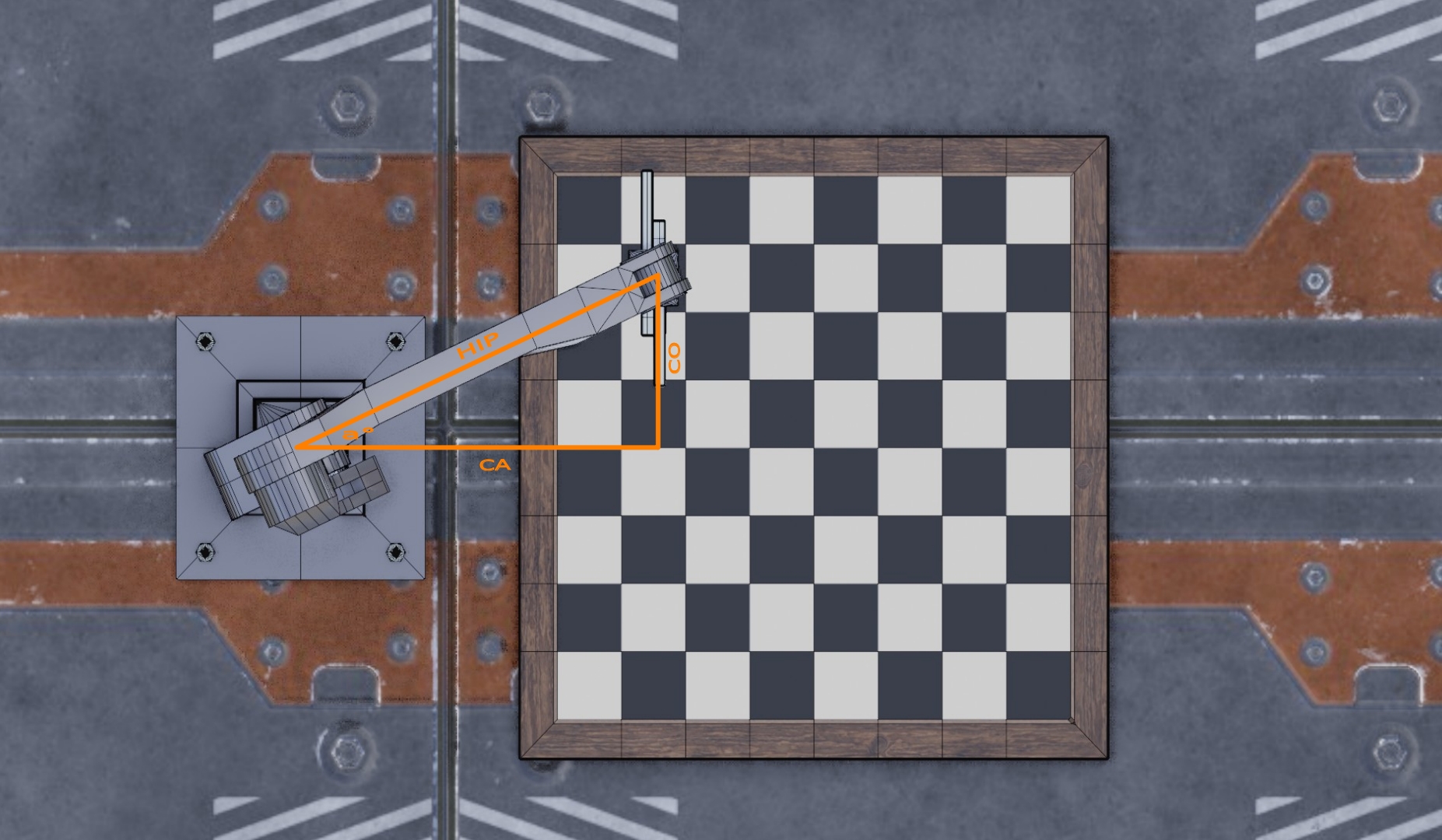
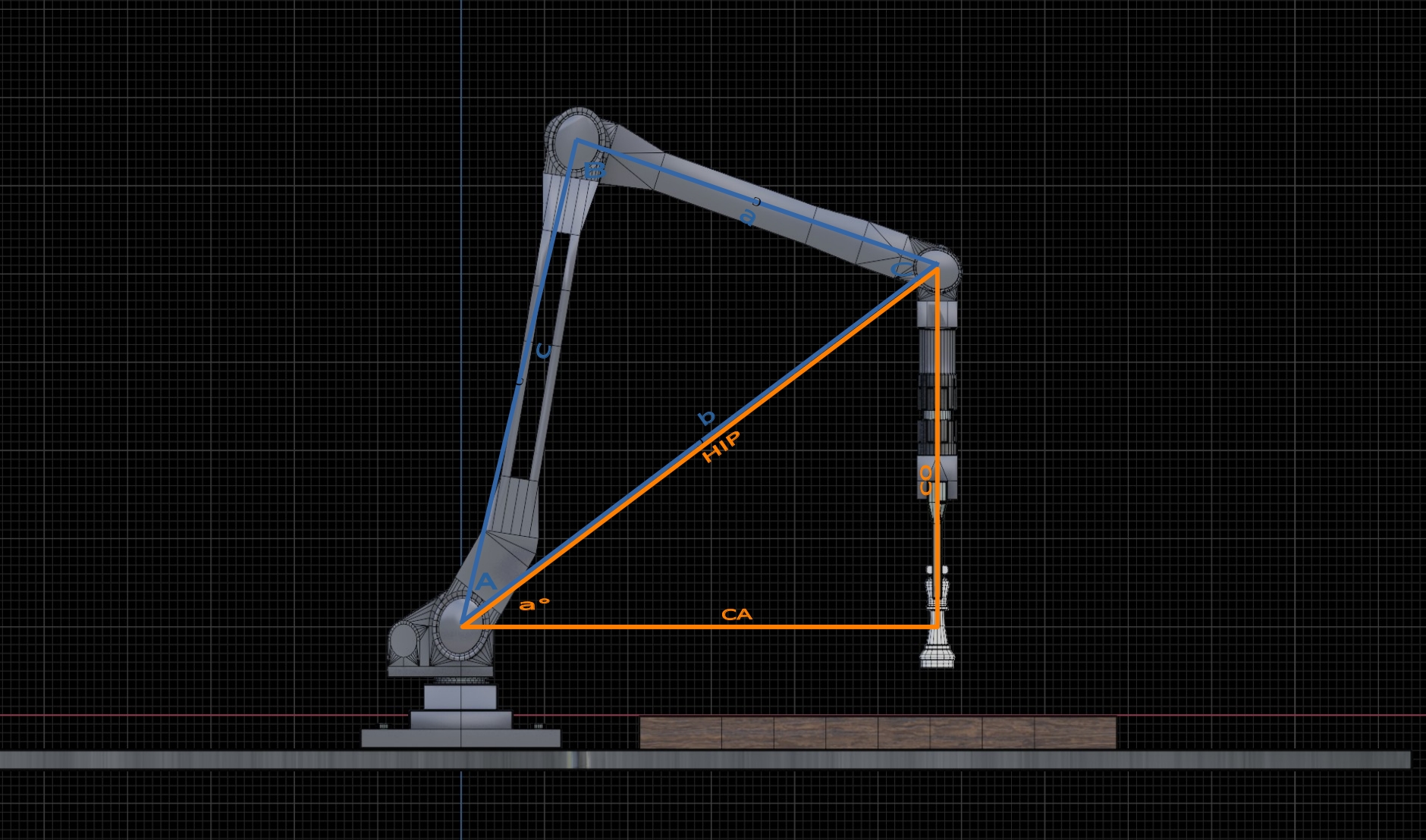
Rotación de la base en el eje Z
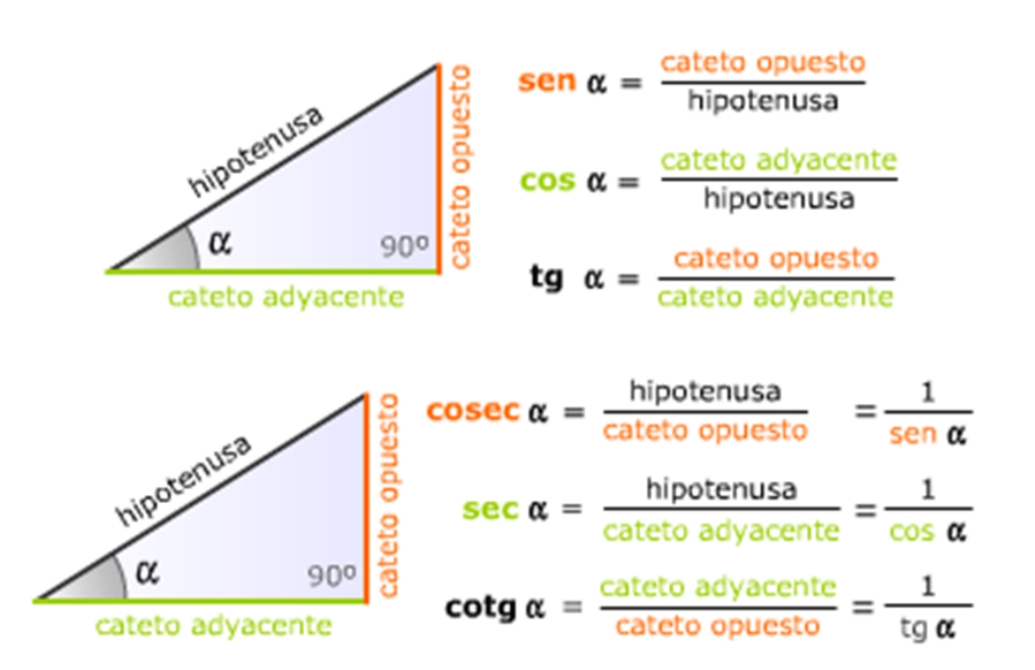
El ángulo de rotación de la base se obtiene resolviendo un triángulo rectángulo generado entre la posición del objetivo y el punto de origen del brazo.
Dado que conocemos:
- El cateto adyacente (CA)
- El cateto opuesto (CO)
- La hipotenusa
es posible calcular el ángulo utilizando funciones trigonométricas básicas y el teorema de Pitágoras.
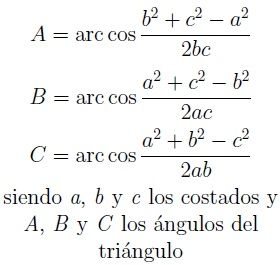
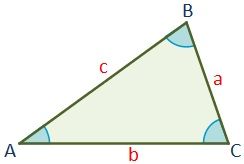
Cálculo de los ángulos de los brazos mediante resolución de triángulos oblicuángulos
Una vez obtenida la orientación de la base, los ángulos de las articulaciones principales del brazo se calculan resolviendo un triángulo oblicuángulo.
En geometría, cualquier triángulo puede resolverse si se conocen al menos tres de sus elementos, siendo obligatorio que uno de ellos corresponda a un lado. En este caso:
- Se conocen las longitudes de ambos segmentos del brazo.
- La distancia al objetivo genera naturalmente un tercer lado.
- Con estos valores es posible calcular los ángulos internos mediante trigonometría.
La hipotenusa utilizada en los cálculos proviene de la resolución del triángulo rectángulo generado por la distancia horizontal y la elevación del objetivo respecto al brazo robótico.
Implementación en Blender
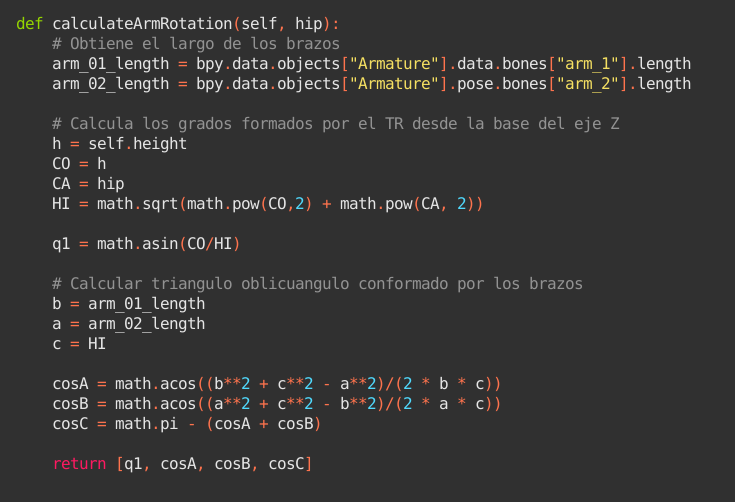
Las fórmulas matemáticas fueron implementadas mediante código y drivers dentro de Blender, permitiendo que las articulaciones reaccionen dinámicamente a la posición del controlador principal.
Este enfoque ofrece varias ventajas:
- Automatización precisa del movimiento.
- Animaciones más limpias y controlables.
- Mayor realismo mecánico.
- Posibilidad de reutilizar el sistema en otros proyectos.
Fragmento del código utilizado para resolver los cálculos trigonométricos: